- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I am wondering if the computer is properly detecting your D415 camera and so cannot get depth data when the launch file tries to access the camera.
Would it be possible please to check whether your camera is functioning correctly in the RealSense Viewer software that comes with the RealSense SDK 2.0? An indicator of a problem would be if you open the Viewer and it cannot detect the camera, or describes it as 'Intel RealSense USB2'
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
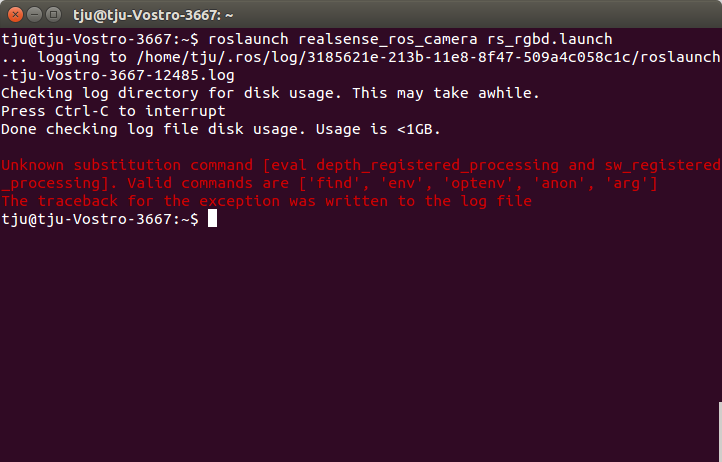
My camera is functioning correctly in the RealSense Viewer software that comes with the RealSense SDK 2.0.The detection picture is as follows.And i can run the order 'roslaunch realsense_ros_camera rs_camera.launch' to get the rgb picture.But When i run the order 'roslaunch realsense_ros_camera rs_rgbd.launch' to try to get pointcloud data. It fails and shows the mistake above.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
One of the leaders of Librealsense, Dorodnic, told another D415 user who had partial frame errors that it indicates an issue related to USB.
https://github.com/IntelRealSense/librealsense/issues/1240 D415 gets corrupted/incomplete frames after a while · Issue # 1240 · IntelRealSense/librealsense · GitHub
Although the error occurs over the RGB stream panel, this seems to just be where error messages are displayed onscreen in the RealSense Viewer and so doesn't necessarily mean that there is a problem with RGB.
Are you using a single-board computer like the user in the case that I linked to, please?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Sorry may be I do not explain my problem clearly.The problem is that when i run the order 'roslaunch realsense_ros_camera rs_rgbd.launch' to try to get the pointcloud data.The mistake turns up as follows.The picture above is to prove that my camera is functioning correctly in the RealSense Viewer software that comes with the RealSense SDK 2.0.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Despite extensive research, I'm afraid I could not find a clear solution for your problem, and I have not dealt with ROS errors related to substitution before. The last thing I can suggest would be to try some RGBD roslaunch statements for other RealSense camera models. If that does not work, you will have to unfortunately wait for someone from Intel support to offer advice after they return to work on Monday (Intel official support days run from Monday to Friday).
$ roslaunch realsense_camera r200_nodelet_rgbd.launch
$ roslaunch realsense_camera sr300_nodelet_rgdb.launch
$ roslaunch realsense_camera zr300_nodelet_rgdb.launch
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello empathy,
Use this command:
roslaunch realsense2_camera rs_rgbd.launchas detailed in this page: https://github.com/intel-ros/realsense https://github.com/intel-ros/realsense.
The realsense_ros_camera package is for a different version of RealSense ROS that is no longer active or supported. realsense_ros_camera was built is a legacy package for legacy cameras.
Regards,
Jesus G.
Intel Customer Support
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page