- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Guys,
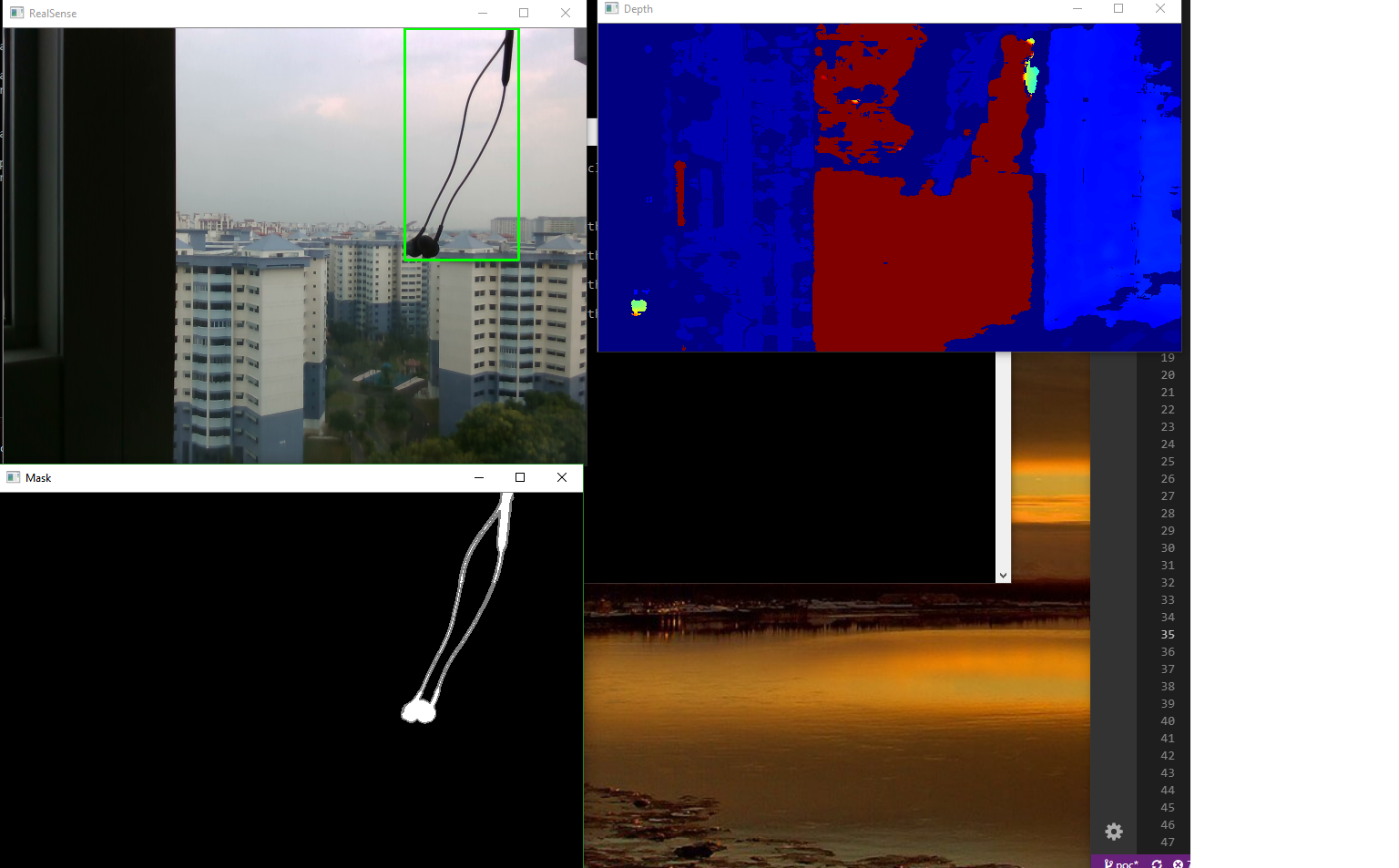
Was finally able to get my hands on the D435 and got to play around with it. I've manage to work around my current background subtraction code with pyrealsense and was able to get the x,y coords of a detected object. Now Im checking how am I able to retrieve the exact depth information in the form of a value in my program? Will inputting the current x,y coords help in any way?
For example, I have the x,y midpoint coords of that bounding box and now I wish to get the depth distance of the x,y midpoints.
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
The developer UnaNancyOwen has a depth program example for OpenCV.
https://github.com/UnaNancyOwen/RealSense2Sample/blob/master/sample/Depth/realsense.cpp RealSense2Sample/realsense.cpp at master · UnaNancyOwen/RealSense2Sample · GitHub
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi,
thanks again for the resource. You won't happen to know any examples in python?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Intel has published a Python tutorial called distance_to_object.
https://github.com/IntelRealSense/librealsense/blob/jupyter/notebooks/distance_to_object.ipynb librealsense/distance_to_object.ipynb at jupyter · IntelRealSense/librealsense · GitHub
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page